在上一篇文章中,对构建TensorRT引擎进行了介绍,本文将详细介绍如何使用Python API通过TensorRT引擎加速,实现单幅图像的推断
workflow 单幅图像的推理过程大致如下
实现 首先是导入需要的包
1 2 3 4 5 6 import cv2import timeimport numpy as npimport loggingimport argparseimport tensorrt as trt
cv2用于进行图像文件加载、图像预处理以及画框,time用于进行耗时统计,numpy用于进行前后处理中的张量操作,argparse用于构造一个参数解析器,tensorrt是TensorRT封装API包
预先设置锚框和锚框掩码,这里需要和训练的模型输出对应上,训练中使用的9个锚框分为了3个尺度,掩码用于标记锚框属于哪个尺度。另外训练过程的锚框数值是用的归一化值还是绝对值必须清楚,我这里锚框的归一化是在解码函数中处理的,因此这里放的是绝对值
1 2 3 4 5 anchors = np.array([(10 , 13 ), (16 , 30 ), (33 , 23 ), (30 , 61 ), (62 , 45 ), (59 , 119 ), (116 , 90 ), (156 , 198 ), (373 , 326 )], np.float32) anchors_mask = np.array([[6 , 7 , 8 ], [3 , 4 , 5 ], [0 , 1 , 2 ]])
参数解析
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 def parse_args (): parser = argparse.ArgumentParser() parser.add_argument('--engine' , help ='TensorRT engine file' ) parser.add_argument('--image' , help ='input image' ) parser.add_argument('--input_size' , default=416 , type =int , help ='model input size' ) parser.add_argument('--inout_dtype' , default='fp32' , choices=['fp32' , 'fp16' , 'int8' ], help ='fp32/fp16/int8' ) parser.add_argument('--model_type' , default='yolov5s' , choices=['yolov3' , 'yolov5s' ], help ='yolo model type select' ) parser.add_argument('--display_width' , default=1920 , type =int , help ='display image width' ) parser.add_argument('--display_height' , default=1080 , type =int , help ='display image height' ) parser.add_argument('--num_classes' , default=20 , type =int , help ='classes num' ) return parser.parse_args()
主要接收参数
engine:引擎文件路径
image:图像文件路径
input_size:模型输入尺寸
inout_dtype:模型精度
准备 main函数中,首先通过参数设置输入输出类型
1 2 3 4 5 6 if args.inout_dtype == 'fp32' : inout_dtype = np.float32 elif args.inout_dtype == 'fp16' : inout_dtype = np.float16 elif args.inout_dtype == 'int8' : inout_dtype = np.int8
然后调用tensorrt初始化函数
1 2 TRT_LOGGER = trt.Logger() trt.init_libnvinfer_plugins(TRT_LOGGER, namespace="" )
根据输入尺度和类别数目初始化模型输出的形状
1 pred_shape = get_pred_shape(args.input_size, args.num_classes)
get_pred_shape定义如下
1 2 3 4 5 6 def get_pred_shape (input_size, num_classes ): shape = [] scale = [int (input_size/x) for x in [8 ,16 ,32 ]] for i in range (3 ): shape.append([1 , scale[i], scale[i], 3 , num_classes+5 ]) return shape
因此在输入尺度为416x416、类别为1的情况下,输出的尺度一共3个:[[1,13,13,3,6]], [1,26,26,3,6], [1,52,52,3,6]],3是每个尺度下有3个锚框,6是4+1+1,分别是预测框位置和有目标置信度以及类别置信度,这些属于YOLO基础概念的内容就不再详细介绍了
读入图像并进行预处理
1 2 im_raw = cv2.imread(args.image) im = image_preprocess(im_raw, args, inout_dtype)
预处理函数定义如下
1 2 3 4 5 6 7 8 9 def image_preprocess (im, args, dtype ): im = cv2.cvtColor(im, cv2.COLOR_BGR2RGB) im = cv2.resize(im, (args.input_size, args.input_size)) im = np.array(im, dtype='float32' ) im = im / 255.0 im = np.expand_dims(im, axis=0 ) im = np.array(im, dtype=dtype, order='C' ) return im
由于opencv默认颜色空间为BRG,因此要转换为RGB,后面显示图像颜色才正常。经过颜色转换后,做一个resize,将图像尺度变换到416x416,然后数值归一化,expand_dims是为了扩展维度,因为模型输入还有一个batch维度,最后进行精度转换
推断 经过预处理后的数据就可以进行推断了
推断过程处理如下
1 2 3 4 with get_engine(args.engine, TRT_LOGGER) as engine, engine.create_execution_context() as context: inputs, outputs, bindings, stream = allocate_buffers(engine) inputs[0 ].host = im inference_outs = do_inference_v2(context, bindings=bindings, inputs=inputs, outputs=outputs, stream=stream)
首先是通过get_engine反序列化引擎
1 2 3 def get_engine (engine_file, logger ): with open (engine_file, "rb" ) as f, trt.Runtime(logger) as runtime: return runtime.deserialize_cuda_engine(f.read())
然后通过反序列化的引擎engine得到执行上下文context,在上下文中,通过allocate_buffers预先分配好输入输出的内存
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 def allocate_buffers (engine ): inputs = [] outputs = [] bindings = [] stream = cuda.Stream() for binding in engine: size = trt.volume(engine.get_binding_shape(binding)) * engine.max_batch_size dtype = trt.nptype(engine.get_binding_dtype(binding)) host_mem = cuda.pagelocked_empty(size, dtype) device_mem = cuda.mem_alloc(host_mem.nbytes) bindings.append(int (device_mem)) if engine.binding_is_input(binding): inputs.append(HostDeviceMem(host_mem, device_mem)) else : outputs.append(HostDeviceMem(host_mem, device_mem)) return inputs, outputs, bindings, stream
熟悉CUDA编程的朋友对这块的内存分配肯定不会陌生,由于计算是在GPU上完成的,CUDA编程中将主机端叫做Host,GPU端叫做Device,要调用CUDA核进行计算,首先需要在Host端创建好输入和输出缓冲区,然后拷贝输入buffer到GPU,计算完成后,将输出buffer拷贝到Host端,这里也是一样的道理。这里的遍历engine的binding就是在遍历引擎中的输入和输出层的内存需求,本模型中一共4个binding,1个输入,3个输出,每次遍历会计算该binding的内存需求大小,然后为该binding分配好主机端和设备端内存,然后将分配好的内存添加到inputs、outputs、bindings数组中
这里定义了一个HostDeviceMem的类,用于方便管理每个Buffer的两个内存空间
1 2 3 4 5 6 7 8 9 10 class HostDeviceMem (object ): def __init__ (self, host_mem, device_mem ): self .host = host_mem self .device = device_mem def __str__ (self ): return "Host:\n" + str (self .host) + "\nDevice:\n" + str (self .device) def __repr__ (self ): return self .__str__()
然后退回到执行上下文中,将预处理后的图像数据赋值给inputs[0],因为只有一个input。然后调用do_inference_v2()函数进行推理
1 2 3 4 5 6 7 8 9 10 11 def do_inference_v2 (context, bindings, inputs, outputs, stream ): [cuda.memcpy_htod_async(inp.device, inp.host, stream) for inp in inputs] context.execute_async_v2(bindings=bindings, stream_handle=stream.handle) [cuda.memcpy_dtoh_async(out.host, out.device, stream) for out in outputs] stream.synchronize() return [out.host for out in outputs]
该函数中首先将所有的输入buffer拷贝到设备中,然后调用execute_async_v2进行推断,推断完成后将输出buffer从设备拷贝到host端,最后进行cuda流的同步等待,返回的outputs就是模型的3个尺度的输出,尺寸和初始化过程中预先设定的3个尺度是一致的
由于默认的模型输出是1维数据,因此需要进行reshape操作,方便后续解码
1 2 3 4 for i, out in enumerate (inference_outs): pred = out.reshape(pred_shape[i]) outputs.append(pred) outputs.reverse()
解码操作
1 2 out_boxes, out_scores, out_classes = decode_box(outputs, anchors, anchors_mask, args.num_classes, [args.input_size, args.input_size], [im_raw.shape[1 ], im_raw.shape[0 ]])
解码函数
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 def decode_box (outputs, anchors, anchors_mask, num_classes, input_shape, image_shape, max_boxes=100 , score_thresh=0.5 , iou_thresh=0.3 ): box_xy = [] box_wh = [] box_scores = [] box_classes = [] out_boxes = [] out_scores = [] out_classes = [] for i in range (len (anchors_mask)): sub_xy, sub_wh, sub_scores, sub_classes = \ yolo_boxes_decode(outputs[i], anchors[anchors_mask[i]], input_shape) box_xy.append(np.reshape(sub_xy, [-1 , 2 ])) box_wh.append(np.reshape(sub_wh, [-1 , 2 ])) box_scores.append(np.reshape(sub_scores, [-1 , 1 ])) box_classes.append(np.reshape(sub_classes, [-1 , num_classes])) box_xy = np.concatenate(box_xy, axis=0 ) box_wh = np.concatenate(box_wh, axis=0 ) box_scores = np.concatenate(box_scores, axis=0 ) box_classes = np.concatenate(box_classes, axis=0 ) boxes = yolo_boxes_transform(box_xy, box_wh, input_shape, image_shape) box_scores = box_scores * box_classes mask = box_scores >= score_thresh for c in range (num_classes): class_boxes = boxes[mask[:, c]] class_box_scores = box_scores[:, c] class_box_scores = class_box_scores[mask[:, c]] nms_index = utils.nms_boxes(class_boxes, class_box_scores, max_boxes, iou_thresh, score_threshold=0.1 ) if len (nms_index) > 0 : class_boxes = class_boxes[nms_index] class_box_scores = class_box_scores[nms_index] classes = np.ones_like(class_box_scores, 'int32' ) * c out_boxes.append(class_boxes) out_scores.append(class_box_scores) out_classes.append(classes) if len (out_boxes) > 0 : out_boxes = np.concatenate(out_boxes, axis=0 ) out_scores = np.concatenate(out_scores, axis=0 ) out_classes = np.concatenate(out_classes, axis=0 ) return out_boxes, out_scores, out_classes
首先是3个尺度下的输出后处理,调用yolo_boxes_decode定义如下
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 def yolo_boxes_decode (feature, anchors, num_classes, input_shape ): grid_size = np.array(feature.shape[1 :3 ]) grid = utils.meshgrid(grid_size[1 ], grid_size[0 ]) grid = np.expand_dims(np.stack(grid, axis=-1 ), axis=2 ) pred_xy, pred_wh, pred_obj, pred_cls = np.split(feature, (2 , 4 , 5 ), axis=-1 ) pred_xy = 2 * sigmoid_np(pred_xy) - 0.5 pred_wh = (sigmoid_np(pred_wh)*2 ) ** 2 pred_obj = sigmoid_np(pred_obj) pred_cls = sigmoid_np(pred_cls) box_xy = (pred_xy + grid.astype(np.float32)) / \ grid_size[..., ::-1 ].astype(np.float32) box_wh = pred_wh * anchors / input_shape return box_xy, box_wh, pred_obj, pred_cls
将输出维度拆分为xy、wh、obj和cls,并将预测的网格坐标转换为真实坐标,,obj和cls直接进行sigmoid运算
3个尺度的所有预测框进行合并,得到13x13x3+26x26x3+52x52x3个一维的xy、wh、scores和classes
然后调用yolo_boxes_transform将归一化的坐标转换为绝对坐标
1 2 3 4 5 6 7 8 9 def yolo_boxes_transform (box_xy, box_wh, input_shape, image_shape ): box_mins = box_xy - (box_wh / 2. ) box_maxes = box_xy + (box_wh / 2. ) boxes = np.concatenate([box_mins[..., 0 :1 ], box_mins[..., 1 :2 ], box_maxes[..., 0 :1 ], box_maxes[..., 1 :2 ]], axis=-1 ) boxes *= np.concatenate([image_shape, image_shape], axis=-1 ) return boxes
然后是一个非极大值抑制,将符合阈值要求的候选框提取出来
最后是根据预测框画矩形框
1 2 3 4 5 6 7 8 def draw_output (img, outputs, class_names ): boxes, objectness, classes, nums = outputs wh = np.flip(img.shape[0 :2 ], 0 ) for i in range (nums): x1y1 = tuple ((np.array(boxes[i][0 :2 ])).astype(np.int32)) x2y2 = tuple ((np.array(boxes[i][2 :4 ])).astype(np.int32)) img = cv2.rectangle(img, x1y1, x2y2, (255 , 0 , 0 ), 2 ) return img
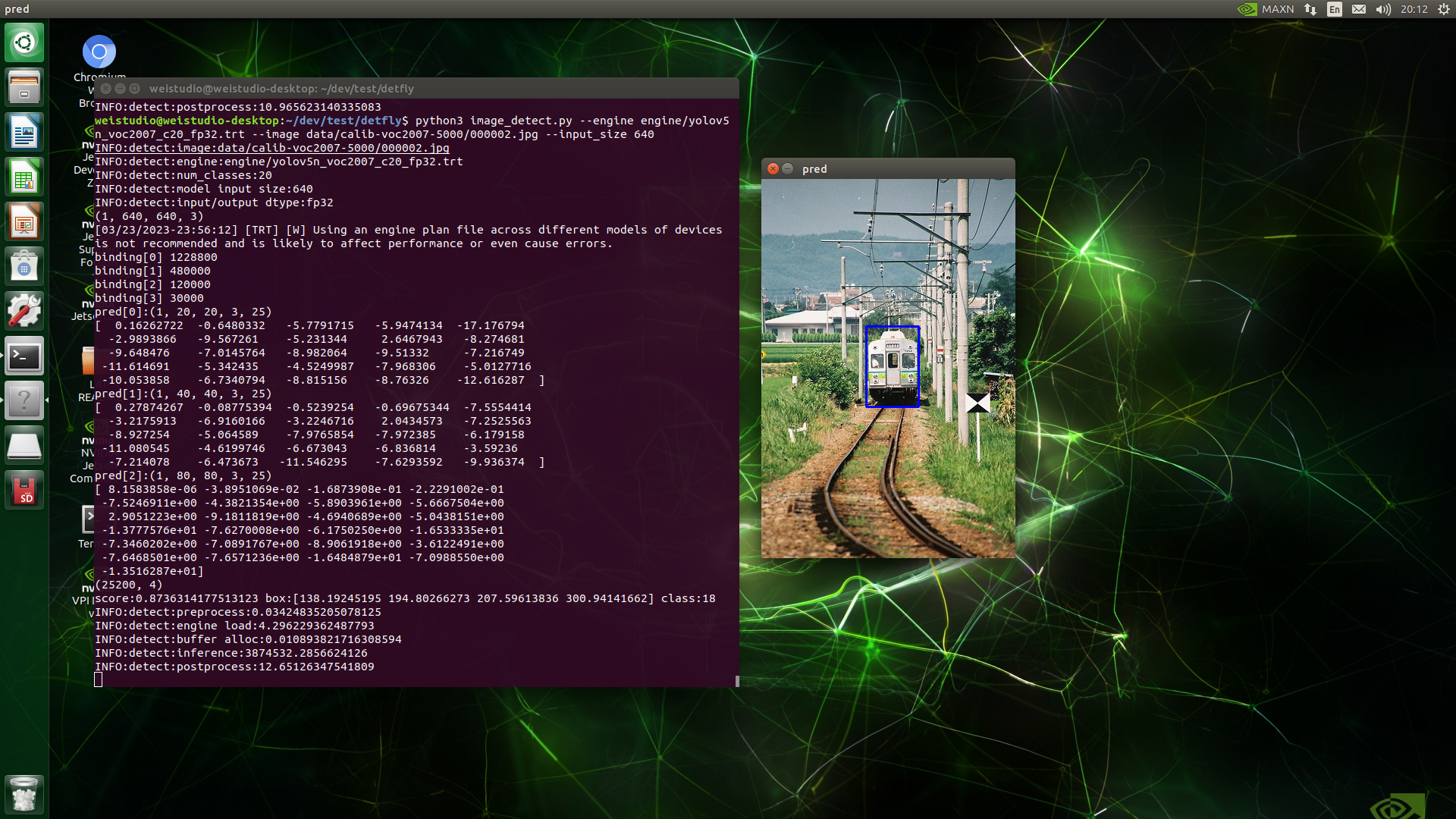
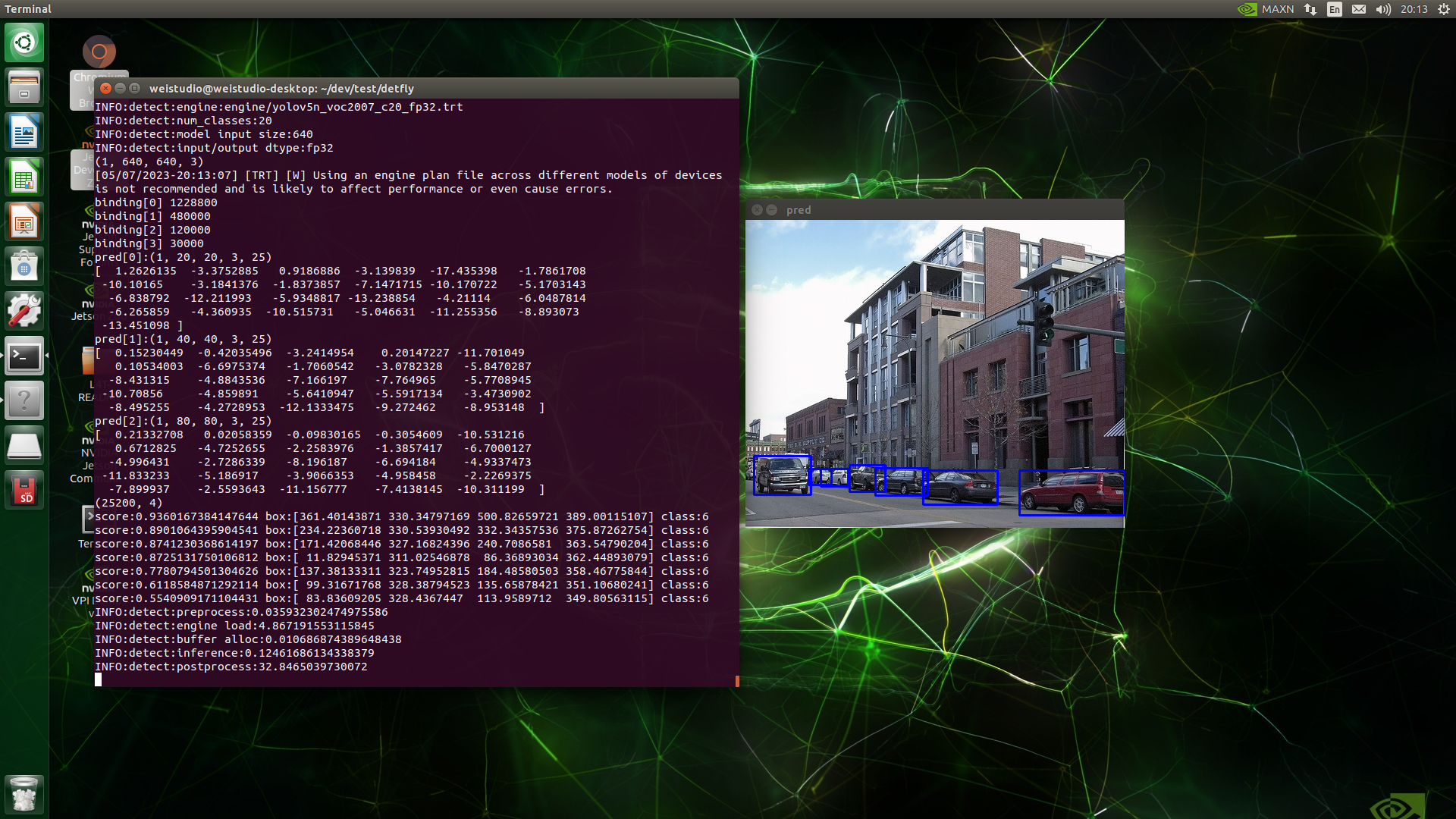
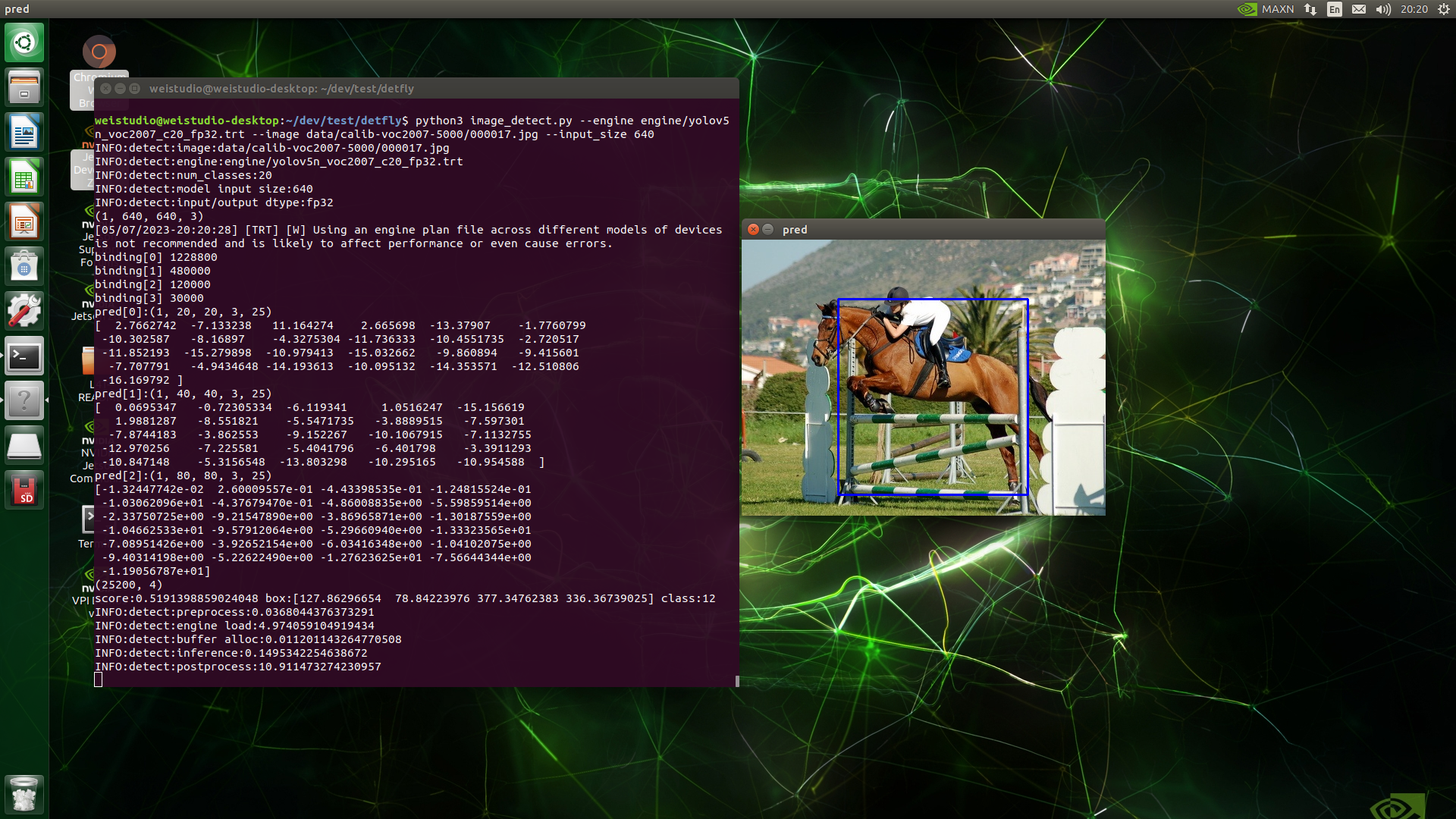
运行示例